













棱镜铅垂装置与顶管自动导向系统在顶管施工中的应用
2022-02-07
运营部

随着顶管施工工艺的不断成熟和完善,加之顶管工艺能够在较深地层中施工,因而广泛运用于进行市政排管、电厂取排水排管等的施工,以确保施工的高效率及施工过程的安全。顶管工程均具有管径多变、管材多样、设计线性多变等显著特点。
顶管施工过程中,如何确定顶管机实时的空间位置以及引导顶管机沿设计轴线开挖,是非常重要的,这对顶管最终是否能够顺利贯通产生直接影响。
本文以上海周邓公路污水干管完善工程为背景,详细介绍了一种安装于顶管机内,使测量目标棱镜始终保持铅垂的装置,该装置与顶管自动导向系统配合使用,能够高效地获取顶管机实时的空间位置,从而对顶管轴线进行高精度的控制,取得了很好的效果。
1棱镜铅垂装置概述
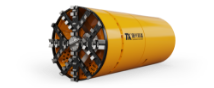
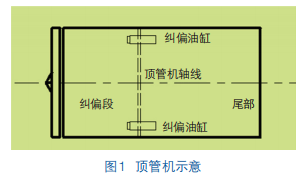
棱镜铅垂装置是安装在顶管机(图1)内用于安置测量目标的装置。在施工过程中,因顶管机旋转角过大,会造成测量结果存在一定误差,以及因顶管机内部空间狭小而较难获取测量通视窗口最大化等问题。为解决上述问题,提出并设计了棱镜铅垂装置,该装置能有效提高测量结果的精度,获取最大化的测量通视窗口。
目前,在顶管施工测量中,通常将测量目标(棱镜或靶牌)直接安装于顶管机内部的中心位置,通过人工测量或自动测量直接获取顶管机的空间位置,指导掘进。在实际施工中,由于顶管机的多样性、内部空间狭小等问题,无法直接将测量目标安装于顶管机中心位置,只能将测量目标平移一个位置进行测量,将目标平移量结合目标测量结果推算顶管机中心空间位置;当顶管机产生较大的旋转角时,测量目标的平移量会发生变化,且变化量与旋转角的大小和旋转方向均有关系,对测量结果会造成较大的影响。实践证明,在顶管施工中,顶管机大概率会出现较大旋转角的情况,且超过倾斜传感器的测量范围,因此,过大的旋转角会给测量结果带来较大的误差。有些测量目标虽然安装在顶管机中心位置,但其位置在顶管机纠偏段的后方,当纠偏油缸开启后,会导致测量目标中心偏离顶管机轴线,对测量结果有较大影响,且会造成纠偏动作滞后和偏离轴线较大的情况,影响顶管施工质量。
1.1棱镜铅垂装置
针对上述问题,研究如何在不同的顶管机内合理地安置测量目标,且能够给施工测量有更多的灵活空间和可选择性,从而有效提高测量结果的精度及工作效率。
棱镜铅垂装置,是利用重力原理,使其无论在顶管机如何旋转的情况下,始终保持铅垂状态。由于测量目标棱镜始终保持铅垂状态,从而使安置于棱镜铅垂装置上的目标棱镜始终与顶管机的相对位置关系保持不变;或是通过一定的测量方法精确获取测量目标棱镜的位移量,得出顶管机偏离轴线值。
棱镜铅垂装置主要由3部分组成,分为中心核心装置、上部连接杆和下部连接杆。
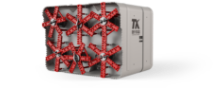
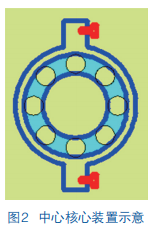
中心核心装置:由一个可360°自由旋转的机械轴承和一个轴承套构成。将机械轴承安装于经特殊加工的轴承套内,轴承套上、下两对称点处预留接力孔,用于和上、下部连接杆进行连接(图2)。
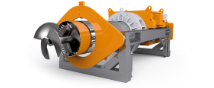
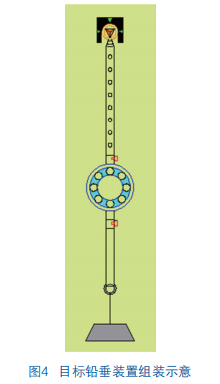
上部连接杆:与中心核心装置连接,上部连接杆设计为带刻度可伸缩式,从而使棱镜铅垂装置可适用于不同管径的顶管机,有效解决因顶管机内空间狭小造成的测量视线通视等问题。测量目标棱镜安装于连接杆最上部(图3)。

下部连接杆:与中心核心装置连接,最下部悬挂重锤,悬挂的重锤需选用质量大于上部质量的重锤,以达到装置始终处于铅垂状态的目的(图4)。
1.2棱镜铅垂装置安装位置的选择
由于顶管机的多样性,棱镜铅垂装置安装位置的选择,在很大程度上取决于顶管机切屑刀盘驱动马达的个数。常见的有双驱动马达顶管机、三驱动马达顶管机和单驱动马达顶管机。对于不同的顶管机,棱镜铅垂装置安装的位置及测量方法均存在差异。
1.2.1棱镜铅垂装置在双驱动、三驱动马达顶管机中的安装
对于双驱动马达顶管机和三驱动马达顶管机,在顶管机始发之前,通过一定的测量方法可精准确定顶管机轴线,根据顶管机内空间大小,在顶管机纠偏段内合适位置,根据确定的顶管机轴线,将棱镜铅垂装置直接安装于顶管机轴线上。
顶管机在施工过程中,无论怎样旋转,旋转多少,安置于棱镜铅垂装置上的测量目标棱镜始终保持铅垂状态,从而保证了测量目标棱镜与顶管机轴线在平面和断面上相对位置关系保持不变。
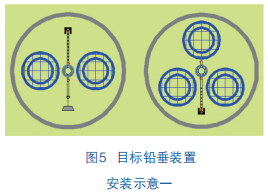
在双驱动马达顶管机和三驱动马达顶管机中,棱镜铅垂装置虽然均安装在顶管机轴线上,但在测量通视窗口的利用上是不同的。在双驱动马达顶管机中测量通视窗口可利用驱动马达上部或下部的空间作为测量通视窗口;而在三驱动马达顶管机中,由于受驱动马达安装位置的影响,只可利用驱动马达下部空间作为测量通视窗口。但无论选择上部或下部作为测量通视窗口,利用棱镜铅垂装置安置测量目标棱镜,均可达到在顶管机有限的空间范围内,使测量通视窗口最大化的目的(图5)。
1.2.2棱镜铅垂装置在单驱动马达顶管机中的安装
在单驱动马达顶管机中,由于驱动马达安装的位置占据了顶管机纠偏段的中心位置,而如果将棱镜铅垂装置安装至纠偏段后方,其造成的弊端在前文已做了详细阐述。因而只能将棱镜铅垂装置安装至驱动马达的两侧,且在安装的数量上与双驱动马达顶管机和三驱动马达顶管机有所区别。
双驱动马达顶管机和三驱动马达顶管机只需在纠偏段中心部位安装1个棱镜铅垂装置,而在单驱动马达顶管机中,需要在驱动马达的两侧分别安装1个棱镜铅垂装置。这样安装的目的,是为了精确获取顶管机实时的旋转角和旋转方向,从而对测量目标棱镜的相对位置参数进行修正,精确地获取顶管机的实时空间位置。
在驱动马达双侧安装棱镜铅垂装置,不只限于在单驱动马达顶管机中使用,同样可适用于双驱动马达顶管机和三驱动马达顶管机(图6)。

对于不同的顶管机,棱镜铅垂装置安装位置的选择均有所不同,但不限于某种顶管机或某个特定位置安装。棱镜铅垂装置的本质是在有限空间内使测量通视窗口最大化和为有效提高测量结果精度提供硬件上的支持。因而在选择安装位置时,应根据实际工况条件,选择最佳的安装位置。
2顶管自动导向系统
顶管工程在施工中,实时获取顶管机的空间位置是十分重要的,是引导顶管机沿设计轴线开挖及顺利贯通的前提条件。传统的人工测量方式,效率较低,尤其在曲线顶管施工中,若采用传统的人工测量,单次测量就需要耗费较多的时间,从而对施工进度产生影响;若为保证施工进度而减少测量的频率,则会对施工质量产生影响。
针对上述人工测量在顶管施工中的弊端,本着以人为本、保质保量和提高测量精度的原则,设计了一种顶管自动导向系统。
2.1顶管自动导向系统的组成
1)带伺服马达的智能全站仪。智能全站仪具备自动搜寻和精确照准目标的功能,且支持数据通信;用于数据的采集。
2)自动整平仪。自动整平仪具备自动整平的功能;安置于管内中继站上;可以对处于运动状态下的全站仪进行自动整平。
3)目标棱镜。采用与所选智能全站仪配套棱镜;目标棱镜分别安置于顶管机内棱镜铅垂装置上(用于获取顶管机实时姿态)、智能全站仪上(目标棱镜中心与全站仪竖轴高度重合,用于坐标、方位及高程的传递),以及顶管工作井内起算边后视点位上(用于方位的传递)。
4)通信装置。采用无线电台传输模式进行通信;用于信号的传输。
5)顶管自动导向软件。软件为该系统的核心,采用VB编程语言开发;用于指令的下达、参数的设置、数据的整合处理和结果的可视化等。
6)软件操作平台。软件操作平台可为笔记本“电脑”或工业“电脑”,计算机操作系统为常规的Windows系统;用于操作软件及数据的存储。
7)其他有关设备。包括相关电源设备,为操作计算机、仪器设备提供电源;“Y”线为仪器设备提供通信支持;RS232转换器可转换接头等。
2.2顶管自动导向原理概述
该顶管自动导向系统测量方法采用向管内敷设导线的形式来实现。由设置在顶管工作井内的起算点和起算方位,向管内进行坐标及方位的传递,高程上采用三角高程方式进行高程传递。为有效提高测量结果精度,数据采集采用测回法测角、往返测距测高差的形式进行。
顶管施工中,由于管节是随着顶管机一同向前的,因而设置在管内的中继站上,均增设自动整平仪,智能全站仪架设于自动整平仪上,智能全站仪的整平操作由自动整平仪自动完成,从而达到对顶管机实时测量,实时获取顶管机空间位置的目的。
由于安置测量目标的棱镜铅垂装置在不同顶管机中安装的位置不同,因而在最终结果计算的方式上也略有不同。
对于将棱镜铅垂装置直接安装于顶管机轴线上的,平面偏离值无需任何改正,直接将坐标结果归算至设计轴线上即可,高程上也只需在参数设置中加入一个高度平移量即可。
对于在顶管机两侧安装棱镜铅垂装置的,由于顶管机的旋转,会造成棱镜铅垂装置与顶管机轴线相对关系发生变化,因而在最终结果计算上,需要通过测量顶管机内两侧棱镜铅垂装置上安置的2个目标棱镜间的实时高差与初始高差之差,计算获取顶管机的旋转角度和旋转方向。
通过获取的顶管机的实时旋转角和旋转方向,对测量结果进行二次修正,以达到最终的结果数据准确的目的。棱镜铅垂装置安装的部位及数量虽然会在最终结果计算上略有差异,但所有计算均由顶管自动导向系统软件自动完成。在实际运用中,只需对相关参数设置正确即可。
3工程实践
3.1工程概况
周邓公路污水干管完善工程主要建设内容为污水排管工程。本项目沿周邓公路敷设污水泵站进水总管、污水干管工程及部分污水收集管网工程等,项目西至规划周浦污水泵站,东至申江路。采用开槽埋管和顶管施工这2种方法进行管道的敷设,其中顶管施工总长度为2673.294m,管径分别为DN1200、DN1400和DN1800,管材为玻璃钢夹砂管。顶管平面最小曲率半径为1869.034m,最大坡度0.1%。
顶管施工分别采用Φ1250mm双驱动马达顶管机、Φ1450mm双驱动马达顶管机和Φ1850mm三驱动马达顶管机进行顶管施工。
3.2工程实践应用结果
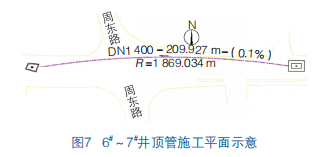
本工程在顶管施工过程中,各顶管区间顶管机内均安装了棱镜铅垂装置,曲线顶管及部分直线顶管施工中采用顶管自动导向系统进行顶管施工导向。由于本工程涉及顶管区间较多,故以6#~7#井区间曲线顶管为例,对实践应用结果加以展示。
6#~7#井区间总长度209.927m,区间平面线性为曲线,曲率半径(R)为1869.034m,坡度0.1%,管径为DN1400玻璃钢夹砂管,采用Φ1450mm双驱动马达顶管机进行顶管施工(图7)。
本区间顶管施工主要难点在于顶管管径较小、全程为曲线顶进,因而在顶管施工过程中,对于顶管机实时空间位置的掌握显得尤为重要,测量数据提供不及时,很可能会造成顶管机轴线偏差较大,影响施工质量。
本区间顶管施工前,通过一定的测量方法对顶管机轴线进行精确测量,获取顶管机轴线数据,结合现场实际工况,在顶管机纠偏段内将棱镜铅垂装置安装于顶管机轴线上,利用顶管机上部空间作为测量通视窗口,安置于棱镜铅垂装置上的目标棱镜中心距离顶管机轴线高差调节至0.3m处。顶管施工过程中采用顶管自动导向系统获取顶管机实时的空间位置,并取得良好的效果。
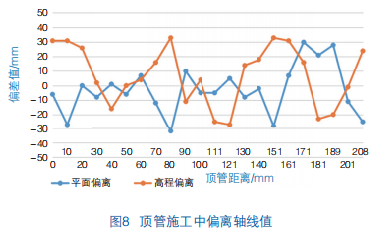
顶管施工过程中,自动导向系统对顶管机的空间位置进行实时测量,采集的数据量较大,因而此处取点间隔约为10m的轴线偏差值予以展示。
由图8可知,平面最大轴线偏差为-32mm,高程最大偏差为+33mm。为充分验证自动导向系统的精度,在顶管顶进约105m及170m时,采用人工测量的方式对顶管机空间位置进行检核。经人工检核,顶管自动导向系统精度良好。
在6#~7#井区间顶管施工过程中,顶管机碰到了废弃的拖拉管线,造成了顶管机较为严重的旋转。棱镜铅垂装置在这样的工况中,充分发挥了作用,使测量工作得以顺利进行,并有效保证了测量结果的精度。
4结语
在周邓公路污水干管完善工程实践中,棱镜铅垂装置有效解决了由顶管机旋转带来的测量误差问题,以及由顶管机内空间狭小造成的测量窗口通视问题。工程实践中,更是展现了顶管自动导向系统结果的可靠性和稳定性。两者相互配合使用,更能起到良好的效果,尤其在小管径的曲线顶管中,其优势更加明显和突出。棱镜铅垂装置和顶管自动导向系统的配合使用,在提高测量结果精度的同时,还能将测量人员从繁杂的施工测量工作中抽离出来,让测量人员有更多的精力投入到控制测量中去,对提高工程质量起到积极作用。



服务热线
400-636-9008

sales@tangxing.cn

400-636-9008